文章
44
标签
53
分类
15
首页
时间轴
标签
分类
留言板
清单
我的她
图库
网站分享
电影
游戏
友链
关于
若水の博客
搜索
首页
时间轴
标签
分类
留言板
清单
我的她
图库
网站分享
电影
游戏
友链
关于
ROS_BEVDet开发日记
发表于
2024-05-27
|
更新于
2026-02-25
|
AI
|
字数总计:
9
|
阅读时长:
1分钟
|
阅读量:
您好, 这里需要密码.
文章作者:
ruoshui
文章链接:
https://blog.aruoshui.fun/posts/14994.html
版权声明:
本博客所有文章除特别声明外,均采用
CC BY-NC-SA 4.0
许可协议。转载请注明来自
若水の博客
!
BEV
目标检测
赞助
微信打赏
上一篇
docker学习记录
下一篇
从0手搓无人机
相关推荐
2024-02-26
BEVDet
评论
ruoshui
文章
44
标签
53
分类
15
Follow Me
公告
--- 主域名 ---
aruoshui.fun
|
--- 欢迎来到我的博客 ---
🍧
欢迎提出你的宝贵意见
🍧
目录
1.
开始阅读BEVDet-Ros-TensorRT-main文件:
2.
已经阅读完整体项目代码,已经标记好输入输出
2.1.
还需要解决的问题
3.
发现周五摄像头处理的问题,经过改进发现解决不了,选择换一条思路进行
4.
继续对周五遗留问题的处理,尝试利用多线程
详细开发过程记录
参考文档
环境配置
1.
ROS_BEVDet搭建
1.1.
拉取源码
1.2.
onnx引擎,TensorRT
1.3.
ROS功能包
1.4.
编译运行
摄像头opencv+gstreamer拉流
1.
参考文档
2.
gstreamer相关函数说明
3.
尝试利用多线程进行图像数据传输
4.
总结:
问题与解决
参考文档
1.
1. ROS功能包(3D边界框)版本依赖
1.1.
报错说明:
1.1.1.
解决方法:
2.
2. [rosrun] Couldn‘t find executable named hello_world_cpp below
2.1.
报错说明:
2.2.
解决方法
2.3.
摄像头运行报错
2.4.
解决问题:
最新文章
深入STM32H7(1)——内联函数、内联汇编、内部函数和嵌入式汇编
2026-02-05
Target Triple不仅仅是字符串
2026-01-09
从linux内核看版本号命名
2026-01-08
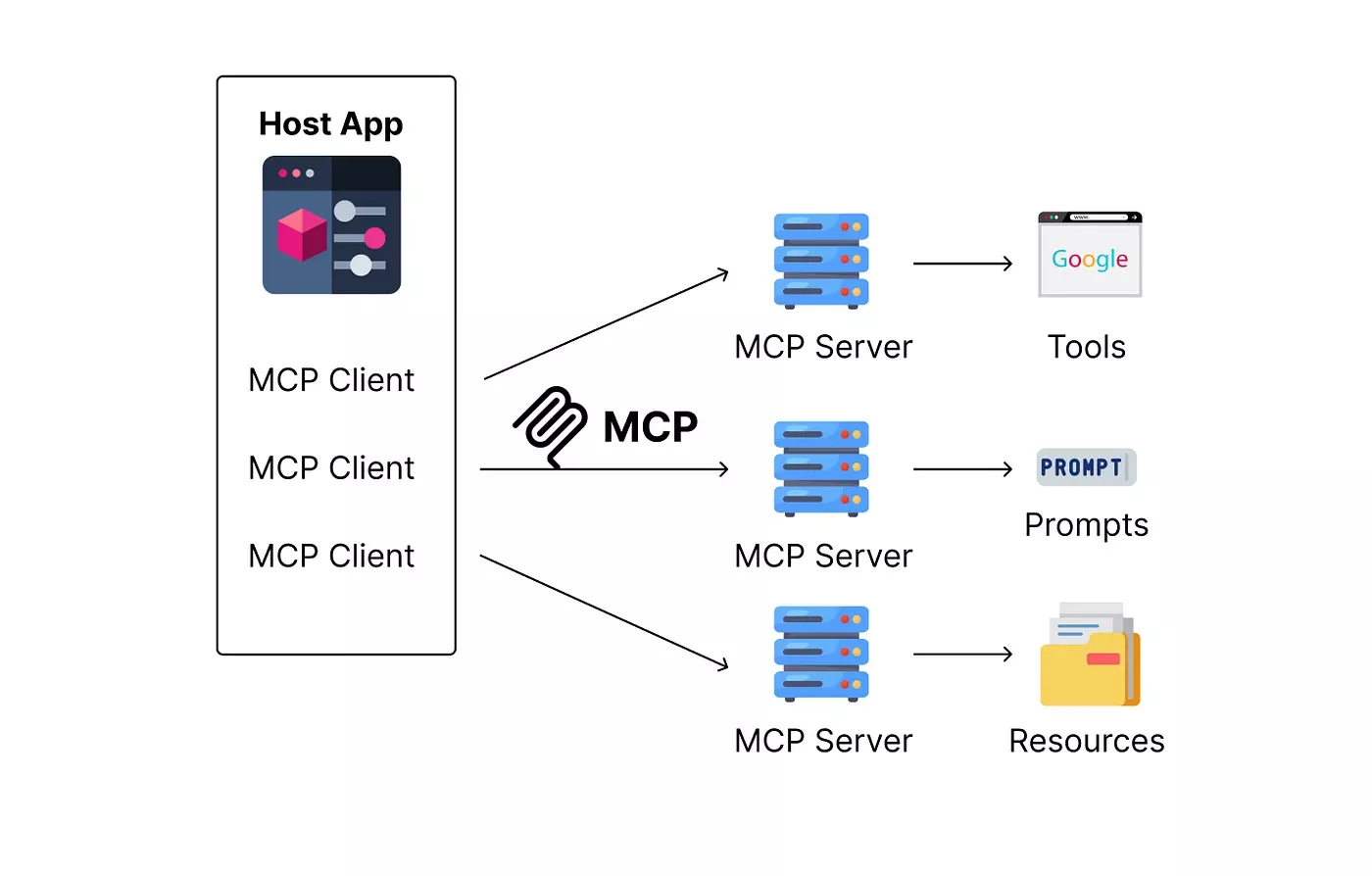
MCP的妙用
2025-10-31
Anthropic公司的成功之路:从0到1835亿美元的秘密
2025-10-30
搜索