

MCP的妙用
深入解析Model Context Protocol(模型上下文协议)的架构、工作原理、配置方法及实践应用

Anthropic公司的成功之路:从0到1835亿美元的秘密
深入剖析Anthropic在短短四年内成为AI领域独角兽的核心竞争力

TDD的文艺复兴:Claude Code如何重塑测试驱动开发
TDD的文艺复兴:Claude Code如何重塑测试驱动开发
前言
测试驱动开发(Test-Driven Development, TDD)自Kent Beck在1990年代提出以来,一直被视为软件工程的最佳实践之一。然而,TDD的实践门槛和时间成本常常让开发者望而却步。随着Claude Code等AI编程助手的出现,TDD正在经历一场"文艺复兴"——不是改变其核心理念,而是让其变得更加高效、直观和易于实践。
TDD的经典困境
1. 心理门槛
传统TDD要求开发者先写测试,后写实现。这种"反直觉"的开发方式需要:
对需求有清晰的理解
提前设计好接口和行为
克服"先实现再测试"的本能冲动
2. 时间成本
许多开发者抱怨TDD会降低开发速度:
编写测试代码本身需要时间
需要频繁在测试和实现之间切换
测试维护成本高
3. 技能要求
编写优质测试需要专门的技能:
理解不同类型的测试(单元测试、集成测试等)
掌握测试框架和最佳实践
设计可测试的代码架构
Claude Code:TDD的理想搭档
1. 降低认知负担
Clau ...

从OpenOCD看嵌入式调试器
嵌入式调试器硬件、软件架构一览,以OpenOCD出发

ClaudeCode最佳实践
参考文章
本文档基于以下权威来源整理而成:
官方资源
Anthropic官方博客 - Claude Code Sandboxinghttps://www.anthropic.com/engineering/claude-code-sandboxing
Anthropic官方博客 - Model Context Protocolhttps://www.anthropic.com/news/model-context-protocol
Anthropic官方博客 - Claude Code Best Practiceshttps://www.anthropic.com/engineering/claude-code-best-practices
Claude Code官方文档https://docs.claude.com/en/docs/claude-code/overview
深度技术分析
How Claude Code is Built - Pragmatic Engineerhttps://newsletter.pragmaticengineer.com/p/how-claude-c ...
我的生产力操作系统哦
外挂样式
默认 提示块标签
default 提示块标签
primary 提示块标签
success 提示块标签
info 提示块标签
warning 提示块标签
danger 提示块标签
参考文章
知乎https://zhuanlan.zhihu.com/p/666861211
CSDNhttps://zhuanlan.zhihu.com/p/666861211
The Omarchy Manualbhttps://learn.omacom.io/2/the-omarchy-manual#leaf_95
稀土掘金https://zhuanlan.zhihu.com/p/666861211
系统介绍
这是我转为linux系统开发的第二个系统,第一个系统采用的是archlinux+gnome桌面,很多都是自己重新配置的,但是由于众所周知的原因(滚挂),系统不小心挂了。考虑再三,在配置时也没有所记录,还是觉得直接重装系统。偶然之间找到了DHH大神的系统,装来试试!
Omarchy 是一个基于 Arch Linux 和平铺窗口管理器 Hyprland 的“主厨发办”(o ...

企业级管理平台的思考与分析
传统管理带来的思考
作为科研密集型企业,会议是支撑科研推进与组织管理的核心手段之一,具有高频次、高要求、高协同的特征。然而,在实际运行中,会议组织工作长期面临三大系统性痛点,严重制约了科研效率与管理效能:
组织专业性不足,执行质量难以保障
高质量科研会议对全流程管理要求极高,需涵盖前期议题策划、议程设计、材料准备,中期现场协调、技术保障、应急响应,以及会后成果提炼、任务分派与闭环跟踪。然而,现实中大量会议由经验尚浅的年轻员工承担,缺乏标准化操作指引和系统培训,“边干边学”成为常态,导致流程混乱、细节疏漏频发,不仅浪费人力物力,更影响会议权威性与决策效力。
管理流程割裂,协同效率低下
会议管理涉及申请、审批、场地预订、通知发布、门禁通行、专家邀请、财务预算与报销等多个环节,但当前各环节普遍孤立运行、缺乏集成设计。
例如:会议申请流程冗长且易因信息不全被反复退回,导致审批超期;财务合规性前置审核缺失,会后报销材料繁杂、易出错,埋下审计风险;内部会议室预订、外部场地协调、电子邀请函发送、门禁权限配置等关联事项各自为政,缺乏统一平台支撑,造成重复操作与信息断层,显著加重行政负担。
...

大模型调优方法:提示工程、RAGs与微调
模型领域智能

Agentic Coding:编程新范式
参考文章
综述:AI Agent 与 Agentic AI 有什么区别?https://zhuanlan.zhihu.com/p/1908131472205930839
Vibe Coding vs. Agentic Coding: Fundamentals and Practical Implications of Agentic AIhttps://arxiv.org/pdf/2505.19443
AI Agents vs. Agentic AI: A Conceptual taxonomy applications and challengeshttps://arxiv.org/pdf/2505.10468
综述:一文讲透Vibe Coding的机理和能力边界https://zhuanlan.zhihu.com/p/1922579978085726171
AI守护者:Anthropic——技术革新与道德引领的双轨传奇https://zhuanlan.zhihu.com/p/1402564536
Anthropic官方揭秘内部团队如何使用 Claude Code(附完整版手册) ...
linux-kernel-interrupt
参考文章
知乎https://zhuanlan.zhihu.com/p/666861211
CSDNhttps://zhuanlan.zhihu.com/p/666861211
githubhttps://zhuanlan.zhihu.com/p/666861211
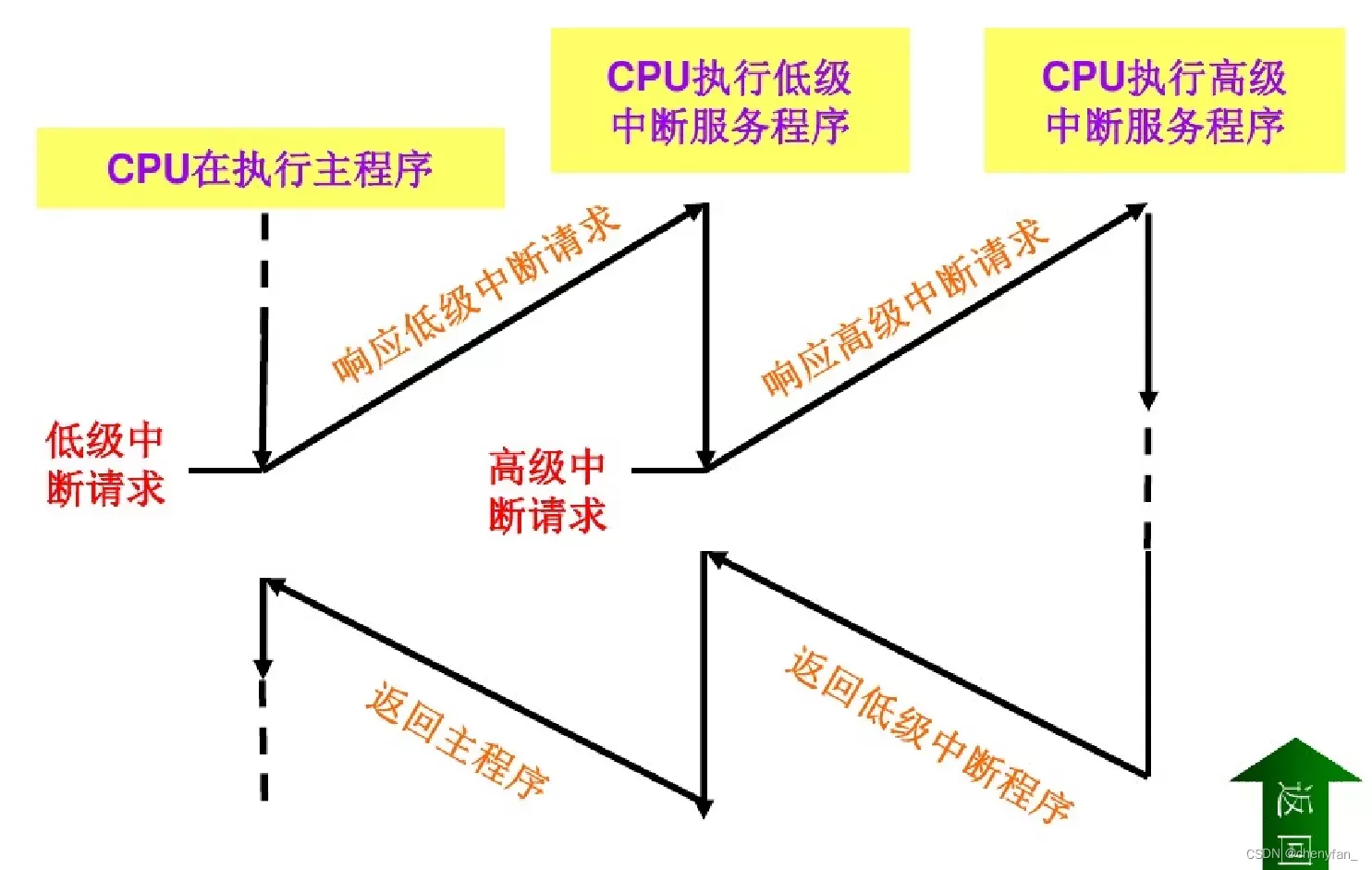
中断
CPU在正常运行期间,由外部或者内部引起的事件,让CPU停下当前正在运行的程序,转而去执行触发他的中断所对应的程序,处理完中断对应的程序以后在回来继续执行。这个就是中断。举例:同学A现在正在厨房做饭,突然电话响了,然后A关火去接电话。接完电话在回去开火继续做饭。这个过程就是一个中断的一个过程。
中断类型
同步中断由CPU本身产生,又称为内部中断。这里同步是指中断请求信号与代码指令之间的同步执行,在一条指令执行完毕后,CPU才能进行中断,不能在执行期间。所以也称为异常(exception)。
异步中断是由外部硬件设备产生,又称为外部中断,与同步中断相反,异步中断可在任何时间产生,包括指令执行期间,所以也被称为中断(interrupt)。
异常又可分为可屏蔽中断(Maskable interrupt) ...
linxu-kernel-syscall
参考文章
『 Linux 』“ 一切皆文件 “https://blog.csdn.net/2202_75303754/article/details/138967355
系统调用的基本概念
在linux中,操作系统负责硬件资源的封装,任务的创建、调度、读写磁盘
μc/os中,采用OSinit-OSTaskCreate-创建一个任务
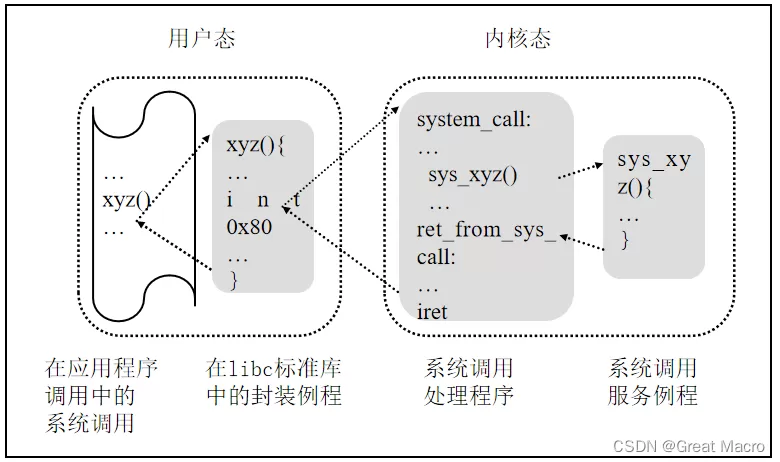
Linux中,拥有权限管理来保证安全,划分内核态和用户态。通过系统调用,让APP某些运行陷入到内核态,以此来访问硬件设备
软中断
权限管理
程序的用户态、内核态
操作系统+ CPU软中断:swi/svc
CPU的运行级别:普通权限(普通运行)、特权(陷入到内核态)
ARM32:
普通模式:User
特权模式:FIQ、IRQ、SVC、ABT、UND
ARM64:EL0、EL1、EL2、EL3
X86:ring0 ~ ring
系统调用号
ARM:swi、svc
ARM : swi、svc
系统调用接口:read、write、printf
内核中的实现:sys_read、sys_write
系统调用号:
32位ARM:3、4
64位A ...
linxu-kernel-module
参考文章
知乎https://zhuanlan.zhihu.com/p/666861211
CSDNhttps://zhuanlan.zhihu.com/p/666861211
githubhttps://zhuanlan.zhihu.com/p/666861211
软件分层思想
BSP:嵌入式底层系统开发,调试程序,让特定的系统跑在特定的板子上,具体的工作包括调Bootloader程序,加载操作系统内核,文件系统的加载,外设驱动程序的开发。
驱动开发:驱动与底层硬件直接打交道,充当了硬件与应用软件中间的桥梁。
应用层:网络服务层、文件系统、虚拟化
基础服务:进程、内存管理、VFS、中断、任务调度
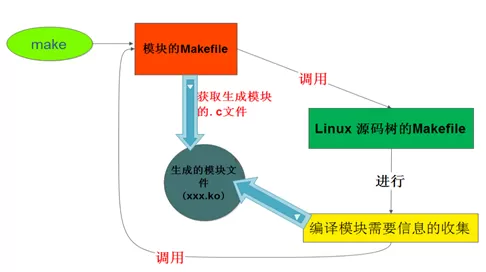
模块化设计
更细粒度的模块划分、模块依赖
功能、模块、子系统、框架
Linux内核中的OOP思想
结构体
函数指针
宏内核与微内核
宏内核:宏内核将操作系统的所有核心功能集中到一个大的内核空间中,所有服务(如设备驱动、文件系统、内存管理等)都运行在内核态,紧密集成在一起。这种设计简化了模块间的交互,提高了性能,但增加了复杂性和维护难度。
微内核:微内核只保留最基本的系 ...