嵌入式系统启动流程
参考文章

Linux的启动过程
桌面端和嵌入式端的启动过程都遵循以下步骤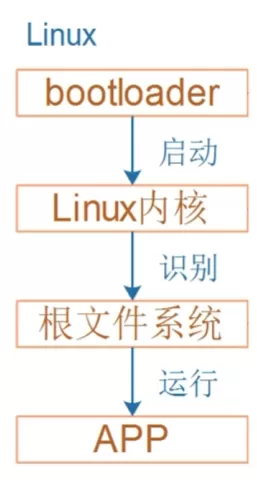
这里以嵌入式端Linux启动为例子:
硬件上电与BootROM阶段
系统通电后,CPU首先执行固化在芯片内部的BootROM代码。该阶段完成基础硬件初始化(如时钟、片内RAM),并根据引脚配置确定启动设备(如eMMC、TF卡),随后从设备中加载SPL(Secondary Program Loader)到RAM并执行。
二级引导加载程序(SPL + U-Boot)
SPL:作为轻量级引导程序,负责初始化DDR内存,并将完整的U-Boot加载到内存中。
U-Boot:进一步初始化硬件(如网络、存储设备),加载Linux内核镜像(含内核、设备树、根文件系统)到内存,并传递启动参数。
Linux内核启动
内核解压后,执行以下关键操作:
初始化硬件子系统:包括中断控制器、内存管理、设备驱动等。
挂载根文件系统:通过内核参数确定根文件系统位置(如从存储设备或网络),完成挂载。
启动第一个用户进程:内核调用start_kernel()完成初始化后,启动/sbin/init进程。
用户空间初始化
init进程:读取/etc/inittab配置文件,设置默认运行级别(如多用户模式)。
执行启动脚本:依次运行/etc/init.d/rcS及对应运行级别目录(如rc5.d)中的脚本,完成网络配置、服务启动等。
启动应用程序:最终通过getty或自定义脚本启动用户应用程序。
关键补充说明
硬件初始化分层:BootROM和U-Boot的硬件初始化可能被内核覆盖,内核的初始化是最终生效的。
内核解压方式:嵌入式系统常采用运行时解压以节省存储空间。
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 若水の博客!
 微信打赏
微信打赏
评论